Søgealgoritmer er et af de vigtigste områder inden for kunstig intelligens. Dette emne vil forklare alt om søgealgoritmerne i AI.
Problemløsningsagenter:
I kunstig intelligens er søgeteknikker universelle problemløsningsmetoder. Rationelle agenter eller Problemløsende agenter i AI brugte for det meste disse søgestrategier eller algoritmer til at løse et specifikt problem og give det bedste resultat. Problemløsningsmidler er de målbaserede midler og bruger atomrepræsentation. I dette emne lærer vi forskellige problemløsende søgealgoritmer.
Søgealgoritmeterminologier:
Egenskaber for søgealgoritmer:
Følgende er de fire væsentlige egenskaber ved søgealgoritmer for at sammenligne effektiviteten af disse algoritmer:
Fuldstændighed: En søgealgoritme siges at være komplet, hvis den garanterer at returnere en løsning, hvis der i det mindste findes en løsning for et tilfældigt input.
Optimalitet: Hvis en løsning fundet til en algoritme med garanti er den bedste løsning (laveste stiomkostning) blandt alle andre løsninger, så siges en sådan løsning til at være en optimal løsning.
Tidskompleksitet: Tidskompleksitet er et mål for tid for en algoritme til at fuldføre sin opgave.
Rumkompleksitet: Det er den maksimale lagerplads, der kræves på ethvert tidspunkt under søgningen, som kompleksiteten af problemet.
Typer af søgealgoritmer
Baseret på søgeproblemerne kan vi klassificere søgealgoritmerne i uinformerede (blind søgning) søgning og informeret søgning (heuristisk søgning) algoritmer.
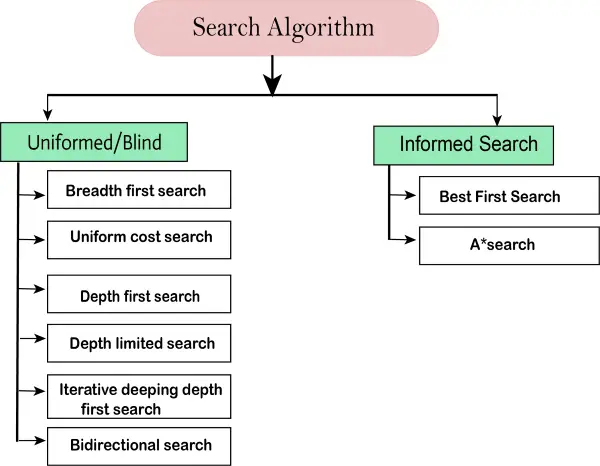
Uoplyst/blind søgning:
Den uinformerede søgning indeholder ingen domæneviden såsom nærhed, placeringen af målet. Den fungerer på en brute-force måde, da den kun indeholder information om, hvordan man krydser træet, og hvordan man identificerer blade og målknuder. Uinformeret søgning anvender en måde, hvorpå søgetræet søges uden nogen information om søgerummet, såsom initialtilstandsoperatorer og test for målet, så det kaldes også blind søgning. Det undersøger hver knude i træet, indtil den når målknuden.
Det kan opdeles i fem hovedtyper:
- Bredde-først søgning
- Ensartet prissøgning
- Dybde-første søgning
- Iterativ uddybning af dybde-først søgning
- Tovejssøgning
Oplyst søgning
Informerede søgealgoritmer bruger domæneviden. I en informeret søgning er probleminformation tilgængelig, som kan guide søgningen. Informerede søgestrategier kan finde en løsning mere effektivt end en uinformeret søgestrategi. Informeret søgning kaldes også en heuristisk søgning.
En heuristik er en måde, som måske ikke altid er garanteret for de bedste løsninger, men garanteret at finde en god løsning inden for rimelig tid.
romertal diagram 1 100
Informeret søgning kan løse mange komplekse problemer, som ikke kunne løses på en anden måde.
Et eksempel på informerede søgealgoritmer er et rejsende sælgerproblem.
- Grådig Søgning
- A* Søg